
interfacce cervello-computer
interfacce cervello-computer
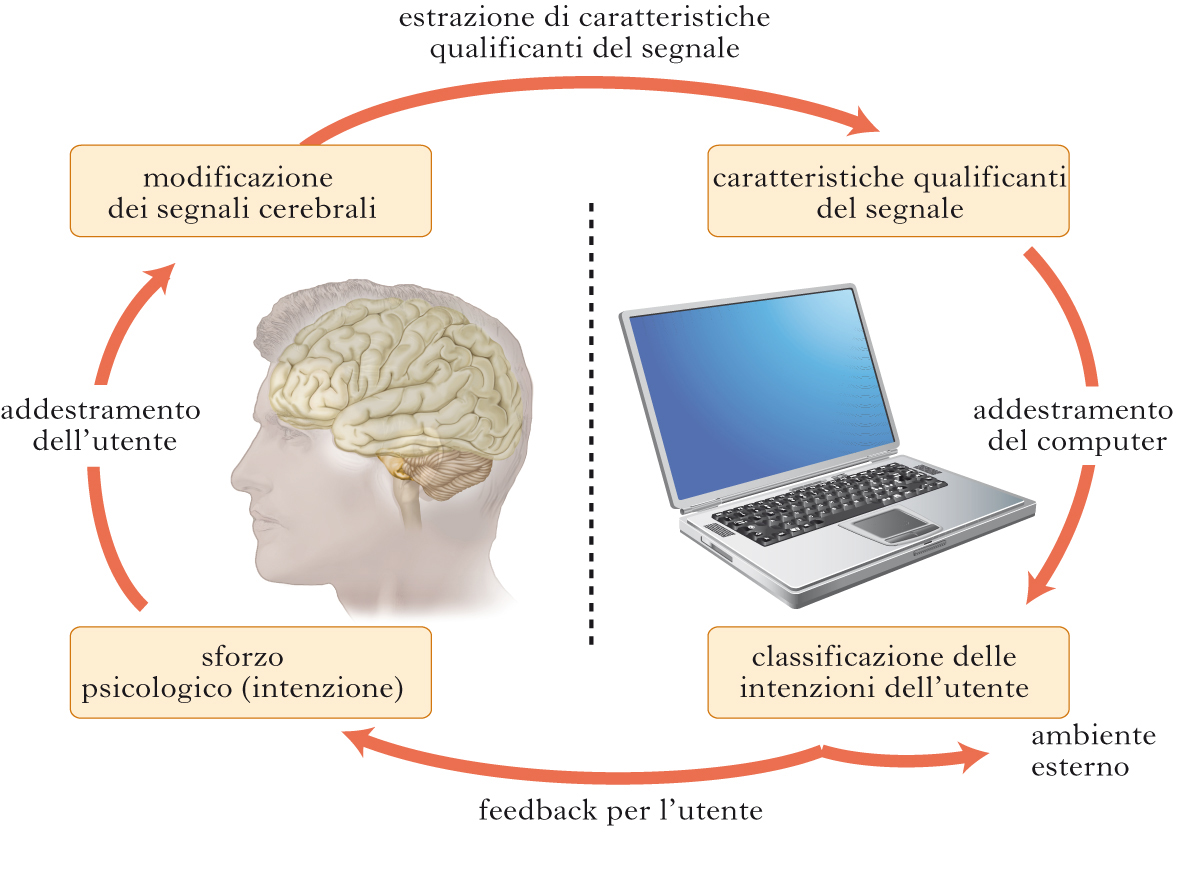
Un’interfaccia cervello-computer dà la possibilità di impiegare un canale di controllo e di comunicazione con dispositivi meccanici ed elettronici che non dipende dai normali canali di uscita di nervi periferici e muscoli. Questo canale è basato sul riconoscimento da parte di un dispositivo di calcolo (usualmente un computer) di variazioni dell’attività cerebrale, indotte sia automaticamente sia volontariamente dal soggetto. Tali variazioni sono registrate con apparecchiature che rilevano correlati dell’attività elettrica massiva dei neuroni (quali l’elettroencefalogramma). Il dispositivo di calcolo estrae dai segnali cerebrali acquisiti alcuni parametri che li descrivono sinteticamente, sia nel dominio del tempo sia in quello delle frequenze. Tali descrittori del segnale elettroencefalografico vengono classificati dal computer in relazione alla volontà del soggetto sperimentale, espressa apertamente durante una fase di addestramento. Questi sistemi sono attualmente in funzione nei laboratori di ricerca per il controllo, tramite attività cerebrale, di alcuni semplici dispositivi domestici (accensione-spegnimento luci, apertura porte, ecc.) e di piccoli sistemi robotici. [➔ dispositivi neuromorfi; elettroencefalografia; intelligenza artificiale; organi sensoriali artificiali; reti neurali] Una i. c.-c. (BCI, dall’ingl. Brain Computer Interface) dà ai suoi utenti, tipicamente persone ma anche primati non umani, la possibilità di impiegare un canale di controllo e di comunicazione per dispositivi meccanici ed elettronici che non dipende dai normali canali di uscita di nervi periferici e muscoli, secondo quanto descritto (2000) da Jonathan Wolpaw e collaboratori. In altre parole, un sistema BCI permette di comandare un dispositivo elettronico (per es. un computer, oppure un televisore) o elettromeccanico (per es., una sedia a rotelle meccanizzata) mediante la modulazione volontaria dell’attività cerebrale dell’utente, senza che quest’ultimo debba impiegare il suo apparato muscolare volontario. È pertanto necessario poter disporre di un dispositivo di acquisizione dell’attività cerebrale che possa restituire in tempo reale informazioni sull’attività del soggetto e un dispositivo di elaborazione di tali informazioni (usualmente un personal computer).
Principali segnali cerebrali in un sistema BCI
Un tipico sistema di BCI non invasivo è basato sull’analisi in tempo reale di dati da elettroencefalografia (EEG) misurati attraverso un certo numero (tra 2 e 64) di elettrodi che ne campionano la distribuzione di potenziale in maniera uniforme sullo scalpo. Tale distribuzione di potenziale è generata dall’attività sincrona dei neuroni della corteccia cerebrale, i quali a loro volta generano correnti elettriche neuronali che si propagano nel liquido extracellulare e che possono essere rilevate, con intensità di alcuni microvolt, sullo scalpo. L’utilizzo di una BCI richiede che l’utente sia in grado di controllare in maniera indiretta almeno alcune caratteristiche grossolane delle sue correnti corticali.
Potenziali evocati. I potenziali evocati sono deflessioni del potenziale dal livello di riposo, della durata di alcune centinaia di millisecondi e di ampiezza di alcuni microvolt, dovuti a uno stimolo esterno; alcuni di essi possono mostrare un decorso temporale sensibilmente differente nel caso in cui il soggetto presti attenzione allo stimolo o meno (ossia, se lo stimolo era atteso oppure inaspettato). È possibile inoltre che il soggetto possa imparare a modificare la composizione in frequenza del proprio EEG in maniera autonoma, senza cioè dover ricorrere a qualche stimolo esterno. Per es., sullo scalpo è possibile registrare con elettrodi di superficie, in prossimità delle zone centroparietali, un particolare ritmo EEG denominato mu. Questo ritmo subisce una forte diminuzione della sua ampiezza di oscillazione (circa 8÷12 Hz) in occorrenza del movimento degli arti. Tale fenomeno è noto in letteratura come desincronizzazione del ritmo alfa. Con l’addestramento, un soggetto può imparare a ottenere questa desincronizzazione del ritmo EEG anche in assenza di un movimento visibile, semplicemente immaginando di muovere l’arto stesso. In tal modo si ottiene il controllo volontario da parte dell’utente di una componente della propria attività cerebrale, che può essere rilevata mediante l’EEG in una particolare banda di frequenza (appunto, 8÷12 Hz), preferenzialmente su elettrodi sovrastanti specifiche aree corticali (sensomotorie). A supporto di tale fenomeno esistono diversi studi che indicano come le aree corticali attive durante l’immaginazione di atti motori siano simili a quelle attive durante l’effettiva esecuzione di tali atti. Infatti, un modello comune di immaginazione del movimento basato su dati neuropsicologici e di neuroimaging postula che la rappresentazione mentale dell’atto motorio e la sua esecuzione reale coinvolgano l’attivazione di aree cerebrali simili, le quali differiscono solo nello stadio finale di attivazione motoria che non è espresso nell’immaginazione.
Potenziali corticali lenti. Questi potenziali (SCP, dall’ingl. Slow Cortical Potentials) sono un’altra caratteristica dell’EEG (nella banda di frequenza sotto 1 Hz) che può essere volontariamente modificata dopo che il soggetto è stato esposto a un periodo di addestramento. In tale addestramento il soggetto apprende da un display sia il segno sia l’ampiezza degli SCP che sta producendo sul suo scalpo. In questo modo è possibile addestrare il soggetto a prendere consapevolezza dello stato psicologico che induce modifiche in questi potenziali, e impiegare opportunamente tale stato psicologico per indurre le variazioni volute sull’EEG prodotto.
L’onda P300. Un altro segnale EEG che può essere impiegato vantaggiosamente per i sistemi BCI è quello relativo a un’onda che compare a ca. 300 ms (positività a 300 ms, P300) dopo l’evento di interesse per il soggetto. Le applicazioni BCI con l’impiego dell’onda P300 presentano una serie di icone lampeggianti in successione sullo schermo che sono di interesse per un soggetto che le osserva (per es., icone relative all’accensione o allo spegnimento del televisore, o di una luce, ecc.). Quando viene fatta lampeggiare dal computer un’icona di interesse per il soggetto (per es., luce accesa nella stanza), il cervello di questo genera automaticamente un’onda caratteristica P300, riconosciuta dal computer che l’associa al comando fatto lampeggiare 300 ms prima. Tutte le metodiche su esposte (modificazione del ritmo EEG, SCP, P300) suggeriscono che mediante l’addestramento sia possibile per un soggetto sperimentale modificare a piacere alcune caratteristiche dell’EEG rilevabile sul suo scalpo. Queste modificazioni, se riconosciute opportunamente da un sistema automatico, possono quindi costituire la base di una possibile comunicazione fra l’utente e il computer senza l’impiego di muscoli.
Difficoltà metodologiche in un sistema BCI
Non è ovviamente scontato né semplice cercare di far riconoscere a sistemi automatici modificazioni volontarie del tracciato EEG con percentuali di errore contenute e tali da poter guidare in sicurezza dispositivi meccanici ed elettronici. Le principali difficoltà incontrate nel riconoscimento delle modificazioni indotte del potenziale sullo scalpo sono di varia natura. La prima è la necessità di una tecnica di apprendimento appropriata perché il soggetto possa imparare come controllare specifici tratti del proprio EEG. Tale tecnica richiede al minimo: strumentazione idonea, che analizzi in tempo reale l’EEG e invii un feedback al soggetto istantaneamente; metodologia appropriata, così che il soggetto non sia frustrato da fallimenti transitori usuali durante la procedura di addestramento; conoscenze appropriate dell’impiego del software di addestramento, perché l’operatore possa efficacemente correggere specifici parametri della BCI affinché diventi più facile il suo controllo per ciascun soggetto. La seconda difficoltà risiede nel fatto che l’EEG corticale non è direttamente accessibile dagli elettrodi, a meno di utilizzare manovre invasive (che nella maggior parte dei casi non sono né etiche né sicure), quali quelle di impiantare degli elettrodi epiduralmente, oppure mediante esposizione della corteccia cerebrale a microelettrodi. Sfortunatamente la conduzione delle correnti elettrotoniche, prodotte dalla corteccia cerebrale, attraversa le strutture della testa, quali cranio e scalpo, e da queste strutture anatomiche è spazialmente distorta e attenuata. Sullo scalpo quindi si presenta una distribuzione di potenziale che è un pallido e attenuato riflesso dell’originale attività corticale. Tale inconveniente deriva dalle diverse conducibilità elettriche delle strutture quali cranio, dura madre, corteccia e scalpo, e introduce una perdita di informazioni che difficilmente può essere ripristinata; tuttavia esistono metodologie appropriate che reintegrano parzialmente tali informazioni mediante elaborazioni spaziali del segnale di potenziale registrato. La terza difficoltà nel riconoscimento dell’attività mentale mediante analisi dell’EEG deriva dal basso rapporto segnale/rumore presente tipicamente sull’EEG stesso. Infatti tale segnale è generalmente caratterizzato a riposo da un comportamento oscillatorio, che normalmente maschera i segnali SCP o P300, e che rende anche le variazioni di ampiezza del ritmo mu difficili da rivelare. Per indirizzare opportunamente tale problema, devono essere impiegate specifiche tecniche di elaborazione del segnale al fine di estrarre le caratteristiche rilevanti dall’EEG di base. Come le impronte digitali vengono confrontate nei database della polizia per riconoscere la persona a cui appartengono, le caratteristiche estratte dal segnale EEG di base vengono confrontate con quelle ottenute durante le fasi di addestramento dell’utente. Il riconoscimento di queste caratteristiche come appartenenti a uno specifico stato mentale dell’utente, generato durante il training, viene eseguito da particolari programmi detti classificatori.
Principali gruppi di ricerca nel BCI
La ricerca scientifica finora si è in generale concentrata intorno al problema dell’identificazione di particolari ritmi e siti dello scalpo in cui fosse possibile registrare un EEG che potesse essere facilmente modificabile dal soggetto sperimentale. Il gruppo di ricerca diretto da Jonathan Wolpaw del Wadsworth centre di Albany (USA) è stato leader, nel primi anni del 21° sec., della ricerca su sistemi BCI non invasivi. Essenzialmente questo gruppo di ricerca ha impiegato le variazioni di attività ritmica dell’EEG che possono essere modificate dal soggetto sperimentale per codificare il movimento di un cursore sullo schermo di un computer. Inoltre, tale gruppo ha ‘disseminato’ la sua conoscenza in questo campo generando un software che è possibile scaricare gratuitamente dalla rete, con il nome di BCI 2000. In tale software sono implementati i necessari algoritmi per l’addestramento degli utenti che vogliono impiegare il sistema BCI mediante l’uso di registrazioni EEG di superficie. Nel corso del primo decennio del 21° sec., le tecnologie BCI sono uscite dall’ambito sperimentale vero e proprio per trovare applicazione in pazienti affetti da diversi gradi di disabilità motoria. In questo contesto è stato particolarmente attivo il gruppo di Tubinga, in Germania, diretto da Andrea Kübler. Le tipiche applicazioni BCI generate nei laboratori di tale gruppo sono state essenzialmente software per la scelta di simboli dell’alfabeto su uno schermo, nell’ambito di semplici programmi per la composizione di testi. Il gruppo di Tubinga ha impiegato i classificatori a soglia (basati sugli SCP) scegliendo direttamente la variazione di potenziale sul vertice dello scalpo. Uno svantaggio di questa scelta risiede nel tempo che la classificazione di un singolo stato mentale comporta, tempo essenzialmente dovuto alla lenta variazione del potenziale sullo scalpo modulabile dall’utente/paziente (tipicamente intorno ai 15 s). Il gruppo di ricerca che ha investigato di più gli aspetti scientifici della classificazione dei potenziali cerebrali ai fini della generazione di un completo sistema BCI è senz’altro quello diretto da Gert Pfurtscheller presso l’università tecnologica di Graz, in Austria. Il gruppo ha ottenuto grandi successi nel riconoscimento di diversi stati mentali impiegando le modificazioni dei ritmi EEG indotte dal soggetto sperimentale sopra le aree centro-parietali dello scalpo, che sovrastano le aree sensitivo-motorie cerebrali. Di particolare interesse i risultati ottenuti da questo gruppo nell’ambito del comando di semplici apparecchiature ortopediche (ortesi) per l’apertura e la chiusura della mano in un soggetto tetraplegico. Tali ortesi sono mosse mediante il comando di semplici motori elettrici, attivati tramite il sistema BCI e la modulazione di particolari ritmi EEG in banda beta in prossimità del vertice dello scalpo. Successivamente, lo stesso gruppo ha generato la contrazione muscolare di un arto di un soggetto disabile mediante l’impiego di un apparato di stimolazione elettrica muscolare (FES, Functional Electric Stimulation) comandato da un sistema BCI non invasivo con elettrodi di superficie. Altri gruppi di ricerca hanno dimostrato la fattibilità dell’impiego di sistemi BCI non invasivi per il controllo di semplici robot mobili. Per es., il gruppo diretto da José del R. Millán presso il centro di ricerche IDIAP, in Svizzera, ha dimostrato di poter controllare robot della dimensione di una macchina giocattolo all’interno di un labirinto mediante l’uso di un sistema BCI basato sull’impiego dell’EEG con elettrodi di superficie. In tale applicazione sono state impiegate le variazioni del ritmo EEG indotte volontariamente dal soggetto sperimentale e riconosciute da una rete neurale con supporto locale.
Prospettive di impiego dei sistemi BCI nel futuro
La qualità della vita di pazienti affetti da malattie che provocano importanti deficit motori è basata significativamente sul supporto dei caregivers, spesso familiari del paziente che lo assistono continuamente. Un dispositivo di assistenza, anche il più avanzato, non può, al presente stato dell’arte, sostituire in qualsiasi modo l’assistenza provvista dal caregiver. Nonostante ciò, dispositivi intelligenti possono contribuire ad alleviare l’obbligo di una continua presenza al fianco del paziente, almeno nella stessa stanza. Infatti, un paziente addestrato all’impiego di tali dispositivi avanzati può da solo compiere semplici attività quali accendere o spegnere la TV, la luce di una stanza, ecc. Inoltre, sistemi di sorveglianza intelligenti, ma ovviamente non guidati da sistemi BCI, possono comunque richiamare l’attenzione del caregiver mediante una qualche forma di allarme. In ambiente clinico, l’impiego di tali sistemi potrà ridurre il costo dell’assistenza. In ambiente domestico, la vita dei caregivers potrà essere migliorata dal grado di autonomia relativa dei pazienti ottenuta mediante l’impiego di questi sussidi tecnologici avanzati. Ancora più importante sarà la percezione, da parte dei pazienti stessi, di un maggior grado di autonomia nelle piccole azioni di tutti i giorni. Questo da una parte aumenterà il loro senso di indipendenza, mentre dall’altra garantirà loro un aumento della privacy, quasi assente nel caso di assistenza continua da parte di un caregiver. Sperimentazioni cliniche sono attualmente (2010) in corso in Italia, per es. condotte dal gruppo guidato da Febo Cincotti dell’istituto Fondazione S. Lucia di Roma. L’utilità dei sistemi BCI non invasivi in ambito sia clinico sia domestico è ritenuta di rilievo solo per quei pazienti che non siano abili a generare in maniera attendibile e ripetitiva qualsiasi movimento volontario. Lo studio di sistemi BCI non invasivi e sempre più affidabili nel riconoscimento dell’attività cerebrale potrà generare una classe di dispositivi comandabili con semplici modificazioni dell’attività cerebrale e che potrebbe essere impiegata da chiunque nelle attività quotidiane. Fabio Babiloni