
organi sensoriali artificiali
organi sensoriali artificiali
Gli organi sensoriali artificiali riproducono le funzionalità tipiche di quelli biologici: vista, udito, tatto, olfatto e gusto. Gli organi artificiali che riproducono l’olfatto e il tatto sono tipicamente realizzati utilizzando circuiti analogici interfacciati a sensori chimici o di pressione. Questi tipi di organi artificiali sono tuttora oggetto di studio e non esistono ancora dispositivi artificiali in grado di ottenere le stesse prestazioni dei rispettivi organi biologici, con analoghe caratteristiche, in termini di compattezza, dissipazione di potenza, gamma dinamica della risposta o resistenza al rumore. Al contrario, organi artificiali che emulano i rispettivi organi sensoriali per la vista e per l’udito sono in una fase avanzata di sviluppo: tipicamente sono basati su circuiti integrati analogici e digitali, realizzati usando la tecnologia microelettronica CMOS (Complementary Metal-Oxide Semiconductor) a scala di integrazione molto elevata (VLSI, Very Large Scale Integration). Questi tipi di dispositivi microelettronici elaborano i segnali sensoriali usando gli stessi principi computazionali presenti nel sistema nervoso e vengono denominati sensori neuromorfi. [➔ dispositivi neuromorfi; informazione neurale; interfacce cervello computer; neuroni e sinapsi, modelli teorici di; segnali cerebrali, analisi dei; sensazione e percezione; trasduzione] Il termine neuromorfo fu coniato da Carver Mead alla fine degli anni Ottanta del secolo scorso per indicare circuiti integrati analogici e sistemi microelettronici che usano la fisica del silicio per riprodurre la biofisica del sistema nervoso.
Dispositivi e sistemi neuromorfi
I circuiti analogici usati per realizzare sistemi neuromorfi sono composti principalmente da transistori a effetto di campo (FET, Field Effect Transistors) polarizzati in debole inversione. In questa regione d’operazione il meccanismo di trasporto dei portatori di carica (elettroni e lacune) è la diffusione, esattamente lo stesso meccanismo che trasporta i portatori di carica (ioni) attraverso i canali proteici presenti nella membrana delle cellule nervose. Il flusso di ioni modifica la polarizzazione della membrana dei neuroni, meccanismo attraverso cui le cellule elaborano e trasmettono le informazioni. Il silicio può dunque essere usato per realizzare circuiti che emulino alcune delle proprietà della computazione neurale. Sfruttando la fisica del silicio, piuttosto che la tradizionale discretizzazione a opera dei circuiti digitali, i sistemi neuromorfi risultano ordini di grandezza più compatti, robusti ed efficienti. Mentre i tradizionali sistemi digitali sono stati sviluppati per calcolo numerico digitale ad altissima precisione, i sistemi biologici si sono evoluti per interagire e sopravvivere nel mondo esterno, sviluppando la capacità di estrarre informazione rilevante dalla stimolazione sensoriale e di produrre in risposta un adeguato comportamento in tempo reale, in un amplissimo spettro di condizioni esterne e, soprattutto, con un bassissimo consumo di risorse. Sistemi artificiali sviluppati secondo principi simili a quelli biologici sono quindi più indicati in applicazioni di tipo percettivo, come appunto gli organi sensoriali artificiali. La caratteristica principale che differenzia gli o. s. a. neuromorfi da sistemi artificiali tradizionali è la capacità di estrarre informazione dagli stimoli, piuttosto che la capacità di riprodurre fedelmente gli stimoli stessi.
Sistemi biologici e digitali
Ciò che distingue i sistemi sensoriali biologici dai sistemi di calcolo digitali finora utilizzati per l’analisi di dati sensoriali, per es. nel campo della visione artificiale (➔) e nel campo delle protesi acustiche, risiede nel modo in cui avvengono la trasduzione del segnale e la computazione, piuttosto che nella potenza di calcolo. I sistemi digitali, per loro natura, rendono discreta ogni variabile, trasformando i segnali in sequenze di 0 e di 1. Ogni calcolo avviene in uno spazio discreto e la ricostruzione e l’interpretazione del segnale vengono operate a ogni passo approssimando allo stato discreto più vicino, variabile per variabile. Al contrario, per i sistemi neurali la computazione si attua in uno spazio continuo dove l’interpretazione del segnale avviene attraverso meccanismi di cooperazione e competizione che tengono conto della relazione tra le diverse variabili in gioco e del contesto in cui l’informazione viene analizzata. Questa caratteristica fa sì che i sistemi neurali siano in grado di interpretare gli stimoli sensoriali che sono rumorosi e spesso ambigui e di ricavarne informazioni precise per interagire con l’ambiente esterno. Queste stesse strategie rendono i sistemi biologici molto ‘robusti’ rispetto a possibili errori o rumori nei segnali o ancora a malfunzionamenti di parti del sistema. Al contrario, i sistemi digitali si bloccano se anche uno solo dei transistori impiegati si rompe. Questa caratteristica diviene sempre più importante con l’avanzare della tecnologia submicrometrica, dove la percentuale di transistor non funzionanti nei processi prodotti aumenta sempre più.
Sistemi sensoriali artificiali e naturali
Il primo passo per produrre sistemi sensoriali artificiali che si ispirino al funzionamento dei corrispettivi biologici è la realizzazione di dispositivi in grado di tradurre gli stimoli sensoriali in modo appropriato. La mera acquisizione ad alta risoluzione di segnali discreti, per es., l’acquisizione dei valori RGB (Red, Green, Blue, usati per la fotografia digitale) da un campo visivo in un dato intervallo di tempo, non è sufficiente né necessaria allo scopo. I sistemi biologici codificano l’informazione in termini di variazioni dei segnali nel tempo e nello spazio. Invece di rispondere a livelli costanti e assoluti, le cellule rispondono ai cambiamenti, risultando enormemente più efficienti, poiché rimuovono dati ridondanti ed elaborano solo l’informazione laddove (e nel momento in cui) è presente un cambiamento. La risposta di un sistema sensoriale è dunque determinata dal succedersi di eventi che provocano la variazione dello stato delle cellule (risposta event-driven) che si contrappone alla strategia adoperata nei sistemi tradizionali di acquisizione dei segnali sensoriali, basati su istantanee statiche del mondo esterno frame-based. Gli o. s. a. descritti di seguito si basano sulle osservazioni fin qui riportate e sviluppano queste e altre proprietà caratteristiche dei sistemi biologici attraverso circuiti elettronici neuromorfi.
Retina artificiale
La retina artificiale è costituita da sensori visivi neuromorfi che realizzano la trasduzione del segnale visivo secondo principi simili a quelli della retina umana. Alcuni di tali sensori replicano soltanto il comportamento dei fotorecettori, il primo strato di cellule fotosensibili di cui è composta la retina; altri tipi di retine artificiali, o sistemi di sensori, riproducono anche alcune delle funzionalità delle cellule presenti negli altri strati della retina (➔ visione). Lo stato dell’arte (2010) nel disegno di circuiti per la visione artificiale che modella il comportamento dei fotorecettori è il sensore visivo dinamico (DVS, Dynamic Vision Sensor) sviluppato presso l’Istituto di neuroinformatica dell’Università di Zurigo e il Politecnico di Zurigo. Ogni pixel (picture element) di tale sensore reagisce a una variazione nel tempo del contrasto luminoso, misurato dal fotorecettore corrispondente, con un impulso digitale. Ogni impulso viene inviato in uscita istantaneamente, senza aspettare che il sensore venga scansionato in modo sequenziale. Il sensore, dunque, risponde alle variazioni dello stimolo in modo asincrono e con altissima risoluzione temporale. Questo tipo di codifica dello stimolo visivo rende il sensore sensibile a un’ampia gamma di stimoli per un intervallo di illuminazione molto ampio. Siccome ogni pixel è indipendente dagli altri, questa codifica rende il sensore sensibile in ambienti con illuminazione non uniforme, dove sensori digitali possono codificare il segnale soltanto parzialmente. La trasmissione e quindi l’analisi e la memorizzazione dei dati risultano efficienti poiché solo le variazione dei segnali viene codificata, eliminando la ridondanza nei dati che invece caratterizza i sensori tradizionali, i quali trasmettono livelli assoluti di intensità luminosa in modo sequenziale e sincrono per ogni pixel del sensore. Il DVS risponde a variazioni di contrasto per illuminazioni da 0,1 lx a 100 klx, corrispondenti all’illuminazione notturna con luna piena e alla luce diurna di una giornata assolata, con una risoluzione temporale di 1 μs e un consumo medio di potenza di 23 mW. Altri sensori emulano le caratteristiche della computazione degli strati cellulari della retina, fino ai campi recettivi del sistema visivo primario. Una retina artificiale in via di realizzazione (2010), caratterizzata da un ampio intervallo dinamico e da risposte sia a transizioni dello stimolo visivo sia a stimolazioni costanti, utilizza fotorecettori logaritmici – sensibili al rosso, blu e verde – e collegati tra loro da una griglia resistiva che determina un filtraggio spaziale in grado di conferire al sensore la caratteristica di rispondere indifferentemente a livelli di luminosità che variano da 750 a 1.500 lx.
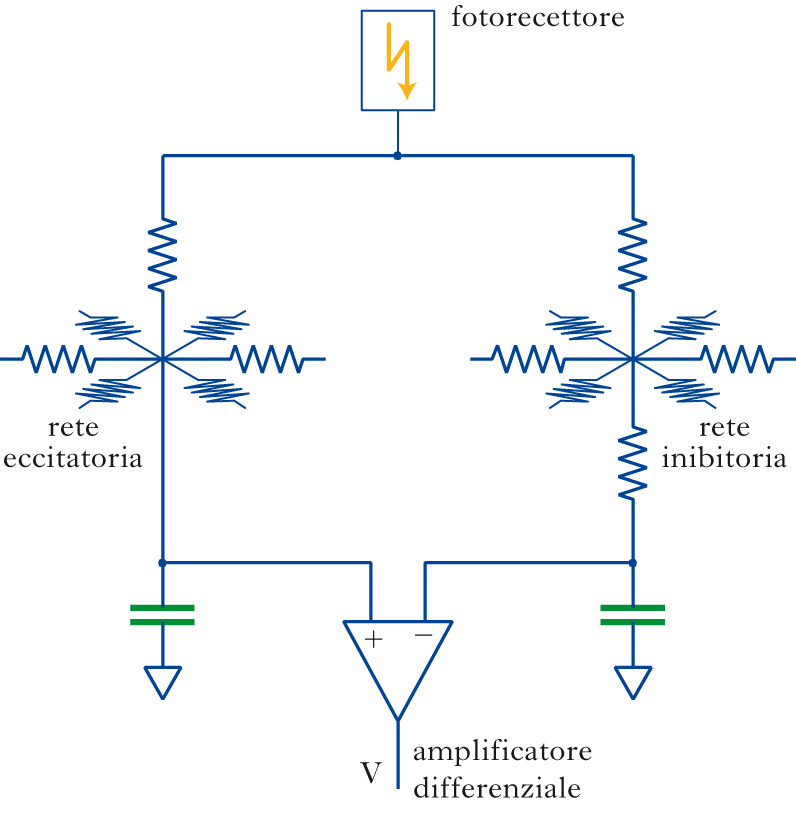
Il gruppo di Kwabena Boahen, all’Università di Stanford, ha sviluppato nel 2005 una retina artificiale che emula le risposte alle variazioni spaziali e temporali delle cellule gangliari della retina umana. Tali cellule sono situate nell’ultimo strato della retina e proiettano sul nervo ottico verso il nucleo genicolato laterale e quindi verso la corteccia visiva primaria. La loro funzione è di integrare l’informazione ricevuta da un gruppo di fotorecettori, interpretando una piccola porzione di campo visivo: emettono impulsi nervosi quando la regione centrale del campo recettivo differisce da quella periferica di una quantità relativa nel tempo e nello spazio. La retina artificiale del gruppo di Boahen dissipa solo 60 mW e in linea di principio potrebbe sostituire lo strato di cellule ganglionari della retina e interfacciarsi direttamente con il nervo ottico.
Coclea artificiale
La coclea artificiale è la riproduzione artificiale dell’organo che nei mammiferi elabora i segnali acustici. Come tale, la progettazione di tale dispositivo studia e modella alcune delle caratteristiche della trasduzione del segnale acustico operata dalla coclea biologica. La coclea è in grado di produrre risposte che differenziano gli stimoli acustici in base alla loro frequenza, e in ciò sembrando a prima vista un mero analizzatore passivo di spettro; al contrario, si tratta di un organo sofisticato in grado di recepire segnali in un ampio spettro di potenza (oltre 120 dB) e frequenze che vanno da 100 Hz fino a circa 10 kHz, adattandosi al livello di intensità sonora, amplificando segnali a bassa intensità e comprimendo quelli ad alta intensità, attraverso un meccanismo non lineare noto come biforcazione di Hopf. Queste caratteristiche ci permettono di percepire un bisbiglio, così come il rombo di un aereo, e di distinguere e capire un discorso di una persona in mezzo ad altre che parlano (➔ udito). Vari tentativi di realizzare coclee artificiali sono stati fatti a partire dalla prima, proposta da Carver Mead nel 1997: si sono ottenuti risultati incoraggianti sia dal punto di vista della funzionalità, che sempre più si avvicina a quella della coclea umana, sia dal punto di vista dell’affidabilità, della compattezza e del consumo di potenza, fattori critici per la realizzazione di protesi impiantabili. Lo studio di protesi cocleari neuromorfe comprende anche la progettazione di sistemi che riproducano l’abilità di localizzare i suoni, grazie all’integrazione dei segnali provenienti da una coppia di organi artificiali. Questa capacità è fondamentale, per es., per poter seguire un discorso tra più conversazioni contemporanee ed è assente nelle odierne protesi acustiche in commercio.
Naso artificiale
Il naso artificiale è un sensore olfattivo in grado di rilevare e riconoscere diversi odori. Quello dell’olfatto (➔) è il primo senso sviluppatosi nel mondo animale ed è fondamentale per la sopravvivenza in quanto fornisce indicazioni sulla disponibilità e sulla qualità delle risorse alimentari, e guida l’individuazione del partner per la riproduzione e il riconoscimento di conspecifici. Tuttavia i nasi artificiali di vario tipo vengono prevalentemente impiegati nell’industria per altri scopi, in partic. come sensori per determinati composti chimici. Si tratta in generale di sistemi con matrici di agenti chimici reattivi a sostanze specifiche, che convertono il segnale chimico in elettrico. Tali matrici sono collegate a software di riconoscimento, in grado di classificare gli odori sulla base dell’uscita del sensore. I sistemi finora sviluppati sono quindi poco compatti ed efficienti, dimostrandosi lontani dalle capacità olfattive del mondo animale. La ricerca su nasi artificiali neuromorfi o ispirati alla biologia è più recente rispetto a quella su altri o. s. a. e si avvale di matrici di elementi sensibili alle molecole odorose associate a metodi di classificazione basati su treni di impulsi, la cui frequenza è in relazione al tipo di odore ed è indipendente dalla concentrazione della molecola odorante. La progettazione di nasi artificiali comprende anche lo studio della mucosa e della cavità nasale, per migliorare la discriminazione degli odori. Sensori di nuova concezione associano più matrici di sensori con diverse dinamiche e ritardi temporali che, associati all’informazione spaziale data dalla localizzazione del particolare sensore attivato, aumentano la capacità di distinguere e classificare odori complessi.
Organi tattili artificiali
Gli organi tattili artificiali sono essenziali per conferire il senso del tatto – e con esso della pressione esercitata durante la manipolazione di oggetti – in soggetti che usano protesi artificiali. A oggi (2010), questi organi si basano sulla tecnologia usata per i touch screen usati nei dispositivi digitali palmari e nei cellulari. La ricerca si concentra su materiali flessibili che meglio possano ricoprire e ospitare i sensori e la relativa elettronica, e allo stesso tempo possano ricoprire superfici curve come polpastrelli e arti artificiali.
Un pioniere degli studi sui sistemi neuromorfi
Carver Mead, professore emerito al Caltech (Californian institute of techonology, Pasadena), è uno dei pionieri della microelettronica moderna.
Tra le sue attività si annoverano la creazione del primo GaAs MESFET (Gallium Arsenide Metal Epitaxial Semiconductor Field Effect Transistor), componente essenziale degli odierni sistemi wireless, e l’analisi basata sulla fisica dei dispositivi per predire il limite fondamentale per la dimensione dei transistori, che, insieme alla nozione di scalabilità, sono alla base dell’industria nanotecnologica.
Mead fu il primo a predire l’integrazione di milioni di transistori su un unico dispositivo (chip), sviluppando le tecniche per la progettazione e verifica di chip e tenendo il primo corso in disegno VLSI (Very Large-Scale Integration). Mead è stato anche il primo a suggerire l’utilizzo di transistori floating-gates per realizzare memorie non volatili.
La collaborazione con John J. Hopfield e il premio Nobel per la fisica Richard P. Feynman sullo studio della computazione nel cervello degli animali ha catalizzato la creazione di tre linee di ricerca fondamentali nella scienza moderna: reti neurali, ingegneria neuromorfa e fisica della computazione. Mead ha creato i primi chip microelettronici ispirati al funzionamento dei neuroni, inclusi retine di silicio e chip che apprendono con l’esperienza. Il suo testo Analog VLSI and Neural Systems (1989) è ormai un classico, costituendo il vademecum degli odierni ingegneri neuromorfi e della ricerca interdisciplinare tra biologia, neuroscienze e ingegneria elettronica. Dal gruppo di studenti di Mead origina l’odierna ricerca sugli o. s. a. neuromorfi nelle principali università. In Europa, Giacomo Indiveri, Tobi Delbrück e Shih-Chii Liu (Politecnico di Zurigo) si occupano rispettivamente della ricerca su percezione del moto, sensori visivi e coclee artificiali. Negli Stati Uniti, Rahul Sarpeshkar (Massachusetts Institute of Technology) sviluppa coclee artificiali, Ralph Etienne-Cummings (Università Johns Hopkins) sensori visivi e di moto, K. Boahen (Università di Stanford) retine e coclee artificiali, Timothy Horiuchi (Università del Maryland) percezione degli ultrasuoni e localizzazione su modello del pipistrello. In Australia, Andre Van Schaik (Università di Sydney) e Tara J. Hamilton (Università del Queensland) disegnano coclee artificiali.